11 mrt. 2021
3 minuten
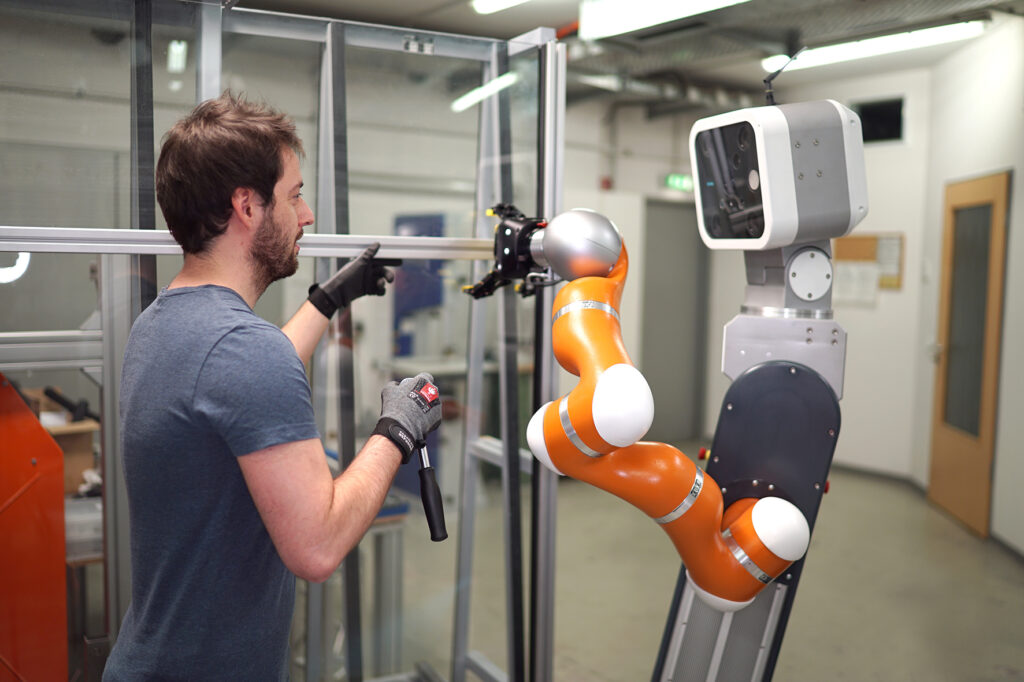
Robotica-experts van het Fraunhofer IFF hebben gezamenlijk met partners uit de industrie en de wetenschap nieuwe technologieën ontwikkelt waarmee mobiele assistent-robots assemblagetaken kunnen uitvoeren, zelfs op bewegende objecten zoals productie aan de lopende band.
Dankzij nieuwe software in combinatie met krachtige radiotechnologieën hoeven de robots niet langer de daarvoor vereiste rekencapaciteiten mee te nemen en bereiken zij toch een tot dusver ongeëvenaarde verwerkingssnelheid. Deze stap opent nieuwe mogelijkheden voor het gebruik van intelligente mobiele assistent-robots en flexibele automatiseringssystemen in tal van industrieën.
Het wijdverbreide gebruik van intelligente mobiele robots biedt de industrie de kans op een duurzame stimulans voor innovatie in de toekomst. Nieuwe, wendbare productiemethoden en fabrieksontwerpen zouden hiermee mogelijk zijn. Assistent-robots en onderling verbonden en samenwerkende flexibele robotsystemen zouden ook op veel plaatsen met mensen kunnen samenwerken. Mobiele assistentierobots hebben zich echter nog geen vaste plaats kunnen veroveren in de industriële omgeving. Een belangrijke uitdaging is de veelzijdigheid van de robot voor een breed scala van taken zonder of met minimale programmeerinspanning. Bovendien zijn de huidige systemen te traag om zelfs maar rudimentaire menselijke eigenschappen te bezitten, bijvoorbeeld bij de herkenning en behandeling van voorwerpen. De oplossing zou een draadloos netwerk van gedistribueerde controlesystemen zijn.
Maar vooral voor taken als het vrij bewegen en hanteren van diverse voorwerpen, moeten de robots in staat zijn hun omgeving voortdurend waar te nemen en zich onmiddellijk zelfstandig aan een dynamisch veranderende omgeving aan te passen. Er is speciale software nodig voor deze onafhankelijke planning van acties en bewegingen, de verwerving en evaluatie van een grote verscheidenheid van sensorgegevens, en het gebruik van grote hoeveelheden gegevens. Deze “intelligente” robotica vormt de basis voor een brede waaier van toepassingen buiten de klassieke automatisering en voor het ontwerpen van uiterst flexibele automatiseringsoplossingen.

Assemblagelijnproductie met mobiele robots
Een team van robotica-experts van het Fraunhofer IFF en partners uit de industrie en de onderzoekswereld is erin geslaagd bovenstaande uitdagingen het hoofd te bieden. Zij ontwikkelden een oplossing van draadloos genetwerkte gedistribueerde controlesystemen die gedecentraliseerde real-time besturing van intelligente mobiele robotsystemen mogelijk maakt.
Wat de softwaresystemen betreft, is hun nieuwe aanpak gebaseerd op een transformatie van de voorheen strikt hiërarchisch georganiseerde automatiseringspiramide in een sterk genetwerkt systeem. Bovendien hebben zij assistentierobots uitgerust met intelligente basisvaardigheden die alleen kunnen worden gerealiseerd in de interactie van genetwerkte, uitbestede IT-diensten op krachtige computertechnologie.
Om hun doel te bereiken, moesten de onderzoekers het hele proces van informatieoverdracht tussen de deelnemers in een dergelijk netwerk opnieuw bekijken en ontwerpen. Christoph Walter, projectmanager bij het Fraunhofer IFF, legt uit: ‘Hierdoor konden we onder andere de statistische betrouwbaarheid en het reactiegedrag van draadloze communicatiekanalen en clouddiensten verbeteren. Verder hebben we toepassingsspecifieke fouttolerantiestrategieën ontwikkeld voor het besturen van robots. Op basis hiervan is een nieuwe robotbesturingsarchitectuur ontstaan, die gebaseerd is op de voorcalculatie van relevante actievarianten in runtime, waardoor snelle reactietijden worden gecombineerd met hogere-orde herkennings- en planningsfuncties.’
Als gevolg daarvan kunnen mobiele en ook stationaire robots nu draadloos worden bewaakt, gelokaliseerd, geconfigureerd en in real time bestuurd met behulp van een radio-infrastructuur. Dit vereenvoudigt ook de integratie van externe sensoren, zoals stationaire camera’s om de robotomgeving en de daarop gebaseerde diensten aan te sturen. Bovendien kunnen lichtere en meer flexibele mobiele robots en manipulatoren worden gebouwd, aangezien zij niet langer hun volledige computertechnologie en energievoorziening met zich mee hoeven te dragen. Het is nu mogelijk volledig nieuwe robotsystemen te ontwikkelen voor de industrie en voor sectoren waarin assistentierobots voorheen niet konden worden gebruikt wegens een gebrek aan prestaties.