
Amsterdam
9 okt. 2018
2 minuten
Om het autoverkeer terug te dringen onderzoekt het Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) in samenwerking met de gemeente Amsterdam en haar onderzoekspartners de mogelijkheid om met onbemande schepen door de grachten te varen.
Huisvuil ophalen is een van de oplossingen waaraan wordt gedacht. Ook over andere diensten wordt nagedacht, zoals pakketten of goederen bezorgen, personenvervoer over water en inspecties van de grachten en waterinfrastructuur. Op de weg slibt Amsterdam dicht, concludeert het AMS Institute en daar moeten innovatieve oplossingen voor bedacht worden. Amsterdam bestaat voor 25 procent uit water. In de gouden eeuw waren de 200 kilometer grachten de transportas van de stad. Dat water kan nu weer voor meer functies gebruikt worden volgens AMS Institute, zodat de stad leefbaar en plezierig blijft. Dr.ir. Stephan van Dijk, hoofd onderzoek en valorisatie van het AMS Institute, werkt nauw samen met TU Delft, Wageningen University & Research (WUR) en Massachusetts Institute of Technology (MIT).
‘We onderzoeken en realiseren projecten om in de regio en stad Amsterdam problemen op te lossen. Dat gaat bijvoorbeeld over verbeterde waterzuivering, energietransitie, een klimaatbestendige stad die goed om kan gaan met zware regenval, of over betrouwbare voedselvoorziening en slimme mobiliteit en dergelijke’, zegt Van Dijk.
Idee
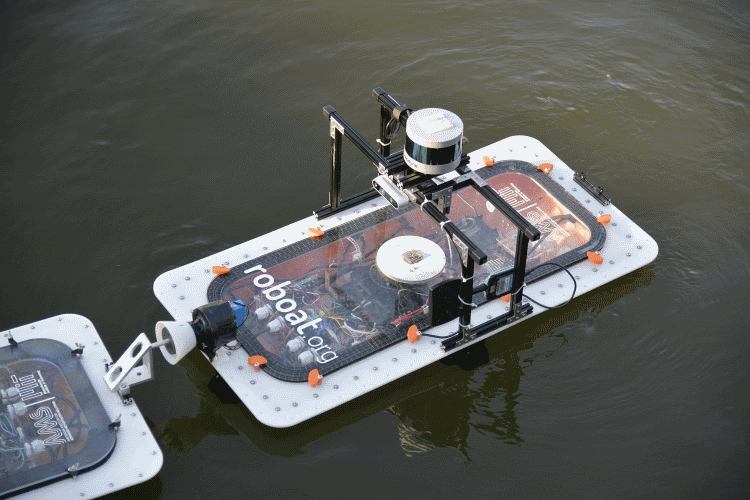
Twee jaar geleden ontstond het idee voor de Roboat en werd er een vijfjarig onderzoeksprogramma gestart met een waarde van 25 miljoen euro. De eerste twee jaar zijn inmiddels afgerond. Recent zijn twee autonome prototypes op schaal gedemonstreerd op Marineterrein Amsterdam. Het LIDAR (LIght Detection And Ranging of Laser Imaging Detection And Ranging) is een technologie die met laserpulsen de afstand tot een object of oppervlak bepaalt. Net als bij radar krijg je in volumes een beeld van de omgeving. Gecombineerd met stereocamerabeelden geeft LIDAR aan waar je je bevindt en welke objecten er in de omgeving zijn. En in combinatie met gps zelfs op de centimeter nauwkeurig. Belangrijk van LIDAR-data is dat je de volumes van objecten en de snelheid kan bepalen, en dus een aanvaring kan voorkomen. Daarnaast werkt LIDAR onder alle weers- en lichtomstandigheden.
Complexer op de weg
Op de weg zijn de situaties vele malen complexer dan op het water. De algoritmes zullen nog helemaal moeten leren hoe boten zich gedragen. Daarnaast reageert een geladen boot anders dan ongeladen. Dat moet de software ook leren en de besturing van de boot daarop aanpassen als dat nodig is. Dennis M. Frenchman, professor bij het MIT legt de plannen voor dit jaar uit. In het derde onderzoeksjaar zal onder andere gewerkt worden aan het opschalen van de autonomie en besturingstechnologie naar 1:2 schaal Roboats.
Ook wordt er gewerkt aan het testen van prototypes voor het ophalen van huisvuil in de Amsterdamse binnenstad en het uitwerken van een use case voor het vervoer van mensen naar musea en interessante plekken in de stad.